PLC控制伺服電機(jī)的三大方式
一、轉(zhuǎn)矩控制
二、位置控制
三、速度模式
1、轉(zhuǎn)矩控制
轉(zhuǎn)矩控制方式是通過外部模擬量的輸入或直接的地址的賦值來設(shè)定電機(jī)軸對外的輸出轉(zhuǎn)矩的大小,具體表現(xiàn)為例如10V對應(yīng)5nm的話,當(dāng)外部模擬量設(shè)定為5V時電機(jī)軸輸出為2.5Nm:如果電機(jī)軸負(fù)載低于2.5Nm時電機(jī)正轉(zhuǎn),外部負(fù)載等于2.5Nm時電機(jī)不轉(zhuǎn),大于2.5Nm時電機(jī)反轉(zhuǎn)(通常在有重力負(fù)載情況下產(chǎn)生)。
可以通過即時的改變模擬量的設(shè)定來改變設(shè)定的力矩大小,也可通過通訊方式改變對應(yīng)的地址的數(shù)值來實(shí)現(xiàn)。
2、位置控制
位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉(zhuǎn)動速度的大小,通過脈沖的個數(shù)來確定轉(zhuǎn)動的角度,也有些伺服可以通過通訊方式直接對速度和位移進(jìn)行賦值。
由于位置模式可以對速度和位置都有很嚴(yán)格的控制,所以一般應(yīng)用于定位裝置。
3、速度模式
通過模擬量的輸入或脈沖的頻率都可以進(jìn)行轉(zhuǎn)動速度的控制,在有上位控制裝置的外環(huán)PID控制時速度模式也可以進(jìn)行定位,但必須把電機(jī)的位置信號或直接負(fù)載的位置信號給上位反饋以做運(yùn)算用。
以SINAMICS V90系統(tǒng)為例說明。
SINAMICS V90 根據(jù)不同的應(yīng)用分為兩個版本:
1. 脈沖序列版本(集成了脈沖,模擬量,USS/MODBUS);
2. profinet通訊版本。
SINAMICS V90 脈沖版本可以實(shí)現(xiàn)內(nèi)部定位塊功能,同時具有脈沖位置控制,速度控制,力矩控制模式。
下圖所示為脈沖串指令速度控制模式(Pti)下的默認(rèn)接口定義,符合標(biāo)準(zhǔn)的應(yīng)用習(xí)慣。

同時只允許使用一個脈沖輸入通道,其他控制信號也可以自由分配到數(shù)字量輸入和輸出端子上,請參見操作手冊。
數(shù)字量輸入,支持NPN和PNP兩種類型。接線圖中的24V電源如下:
(1)用于SINAMICS V90的24V電源。所有的PTO信號都必須連接至使用同一24V電源的控制器,如SINAMICS V90。
(2)隔離的數(shù)字量輸入電源,可使用控制器電源。
(3)隔離的數(shù)字量輸出電源,可使用控制器電源。
SINAMICS V90 伺服驅(qū)動:

電機(jī)抱閘信號(僅用于 SINAMICS V90 200 V 驅(qū)動)。SINAMICS V90 200 V 驅(qū)動需要使用外部繼電器來連接電機(jī)抱閘。
SINAMICS V90 脈沖序列版本的系統(tǒng)接線圖:

SINAMICS V90 PROFINET 版本的系統(tǒng)接線圖:

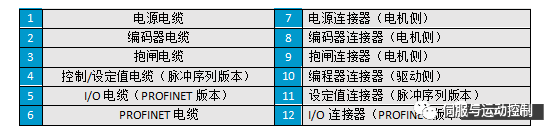
1、SIMOTICS S-1FL6 低慣量電機(jī) SH20、SH30 及SH40 使用電纜型連接器。
2、此處所展示的抱閘電纜連接僅適用于 V90 400 V 驅(qū)動。V90 200 V 驅(qū)動需要使用外部繼電器來連接電機(jī)抱閘電纜。
3、SINAMICS V90 PTI 驅(qū)動必須通過設(shè)定值電纜連接繼電器,而 SINAMICS V90 PROFINET 驅(qū)動通過 I/O 電纜連接繼電器。
4、必須使用 I/O 電纜來實(shí)現(xiàn) SINAMICS V90 PROFINET 200 V 驅(qū)動的抱閘控制,并實(shí)現(xiàn)除 PROFINET 通訊之外需要額外 DI/DO 的應(yīng)用。
相關(guān)產(chǎn)品